
文章目录[隐藏]
S7-200 SMART CPU V2.8 版本升级及增加的新功能:
- 新增程序指令
- HSC 增强功能
- PID 增强功能
- 运动控制增强功能
- PLS 以及 PWM 指令增强功能
- 存储器范围增强
- 安全性增强
以上功能或增强必须满足以下条件才能实现:
具体介绍如下:
新指令
1.位指令
新增两条位指令,分别是ALT指令与ALTP指令。 (Toggle库)
ALT交替输出指令,当IN为高电平时,每个扫描周期ALT指令的OUT状态均翻转,当IN为低电平时,ALT指令的OUT保持之前的状态。
ALTP脉冲交替输出指令,当IN检测到上升沿时,ALTP指令的OUT状态翻转。
利用ALTP指令可以轻松的实现类似设备一键启停的功能。
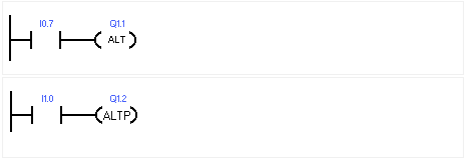
图1 交替输出指令
《200SMART V2.8新指令:交替输出(ALT)和脉冲交替输出(ALTP),电机一键启停控制》
2.转换指令
新增4条转换指令,分别是:
• 双精度浮点数转单精度浮点数 (双精度浮点数转单精度浮点数库)
• BCD转双精度整数 (BCD转双精度整数库)
• 双精度整数转BCD (双精度整数转BCD库)
• 量程变换 (量程变换库scale)
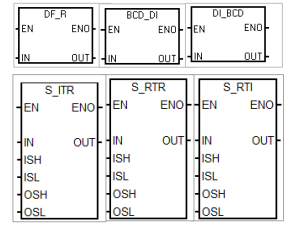
图2 转换指令
以上几个指令在V2.8版本之前是通过添加附加指令库或者自行编程来实现,相比而言,V2.8集成的转换指令具有更快的执行速度。
3.数学指令
新增7条数学指令,用于常见的数据处理,可以极大的减轻编程的难度,分别是:
• 取最大值或最小值 (取最大值或最小值库)
通过该指令可以获取数组中的最大值、最小值以及所处的位置。
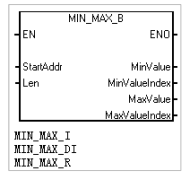
图3 取最大值或最小值指令
• 取随机值 (取随机值库)
生成所设定范围内的一个随机值。
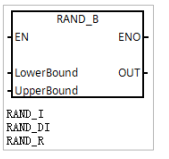
图4 取随机值指令
- 数组排序 (数组排序库)
对数组进行排序,并将其存储在目标存储区。
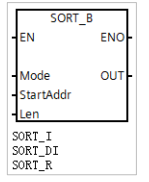
图5 数组排序指令
• 取数组平均值 (取数组平均值库)
计算源数据的平均值,并将其写入目标寄存器。
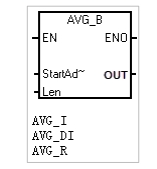
图6 取数组平均值指令
• 取绝对值 (取绝对值库)
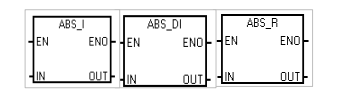
图7 取绝对值指令
• 低通滤波器
支持64路一阶低通滤波器,用于对源数据的滤波处理。
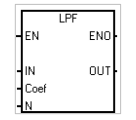
图8 低通滤波器指令
• 反三角函数指令(反三角函数指令库)
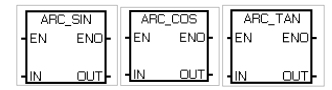
图9 反三角函数指令
4.逻辑操作指令
新增3条逻辑运算符用于逻辑运算,分别是:
• NAND 与非
• NOR 或非
• NXOR 异或非
(逻辑指令库)
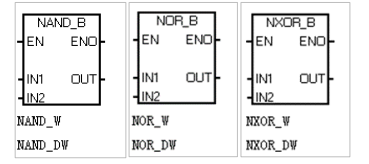
图10 逻辑操作指令
HSC增强功能
V2.8固件的标准型CPU, HSC(高速计数器)功能开始支持频率模式,通过HSC指令或者高速计数器向导,可以轻松的实现对高速脉冲的频率测量,支持三种频率测量周期,分别是1s、100ms、10ms。
-
向导方式
V2.8版本S7-200 SMART CPU 和 STEP 7-MicroWIN SMART 在高速计数器向导中新增频率类型,通过配置向导并调用初始化程序,频率值可通过读取高速计数器当前值寄存器HCx获取。
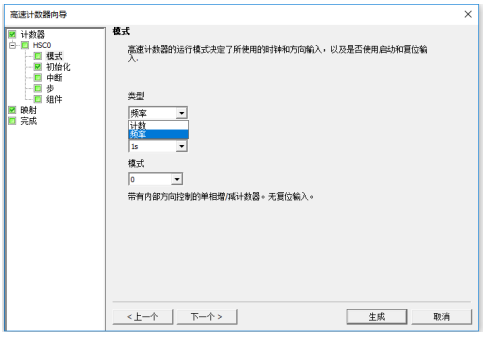
图11 高速计数器向导
-
指令方式
HSC指令除了支持计数模式外,新增频率模式,根据所需的控制操作加载特殊寄存器并调用HSC指令,实现对频率的测量。
PID增强功能
V2.8固件的标准型CPU PID功能得到了全方位的增强,主要包括:
• 支持的PID回路数由8路提升为16路
• 支持PID双向控制
• 新增PID预调节功能,以及增强的PID精确调节功能
除了以上提到的几点,还包括对于PID死区范围的设置,温度控制类型可以设置控制范围,以便于加快调节速度等功能。
-
支持16路PID
V2.8版本S7-200 SMART CPU 和 STEP 7-MicroWIN SMART 可通过向导或者指令的方式配置16路PID。
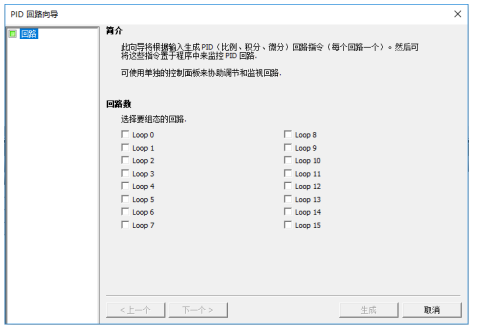
图12 PID回路向导
-
双向PID
通过启用PID向导中的双向输出,可以配置两组PID参数,在正向调节时使用正向参数,负向调节时使用负向参数,例如对制冷/加热的控制。
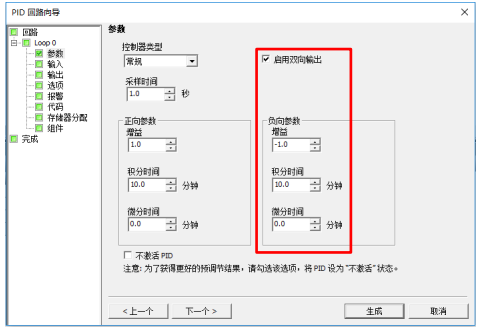
图13 PID回路向导中启用双向输出
-
PID预调节
V2.8版本的标准型CPU PID功能在原有精确调节的基础上,新增了预调节功能,配置完向导并满足一定条件的基础上,即可操作预调节,该功能可大大节约闭环控制系统的调试时间。
实现该功能有两种方法,一种是使用PID整定控制面板,该方式便捷直观,另外一种方式是将相关变量关联至上位机来实现PID参数整定。
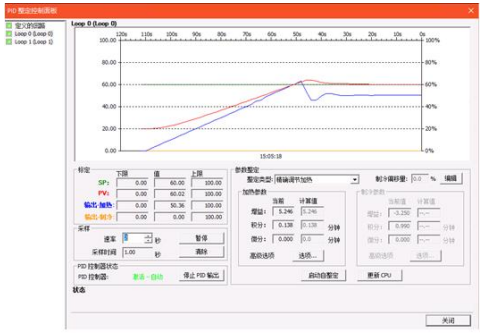
图14 PID整定控制面板
运动控制增强功能
V2.8固件的标准型CPU运动控制新功能如下:
• 对于CPU ST60
脉冲轴的数量由3个扩展为4个。
脉冲轴轴组数量由1个扩展为2个。
• 对于V2.8固件的标准型CPU
新增轴组停止指令:GPRx_STOP,用于命令轴组减速停止或者立即停止。
支持轴组路径规划参数的动态激活,向导中可组态多条路径,根据需求灵活便捷的激活并触发某一段路径。
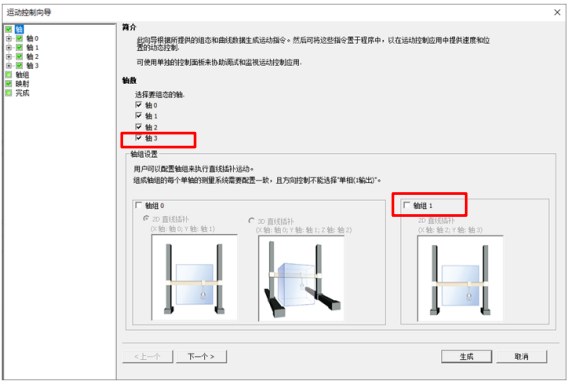
图15 运动控制向导
ST60的PLS和PWM增强功能
由于V2.8版本的ST60脉冲轴由3路增加为4路,用于创建PWM脉宽调制输出的向导,也增加了第4路。
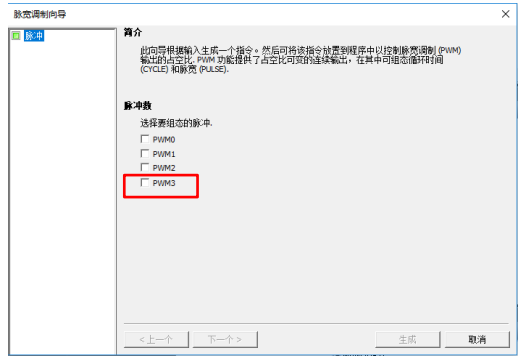
图16 脉宽调制向导
脉冲输出(PLS)指令,在用于ST60时,支持第4个通道的编程。使用方法同前3个轴相同。
存储器范围增强
- V2.8固件版本的标准型CPU,变量存储区分别增加4KB。
表1 用户数据存储器
| 用户数据(V) | V2.7及之前固件(字节) | V2.8固件(字节) |
|---|---|---|
| SR20/ST20 | 8 K | 12 K |
| SR30/ST30 | 12 K | 16 K |
| SR40/ST40 | 16 K | 20 K |
| SR60/ST60 | 20 K | 24 K |
- V2.8固件版本的标准型CPU,数据保持范围分别增加2KB。
表2 用户存储器保持性
| 保持范围 | V2.7及之前固件(字节) | V2.8固件(字节) |
|---|---|---|
| SR20/ST20 | 10 K | 12 K |
| SR30/ST30 | 10 K | 12 K |
| SR40/ST40 | 10 K | 12 K |
| SR60/ST60 | 10 K | 12 K |
安全性增强
采用更精密高效的算法来保护PLC的安全。对于从之前的固件版本升级到V2.8固件时,新安全解决方案将自动加载,无需重新下载项目。
采用更强大的算法来保护POU的安全。如果要用V2.8的安全解决方案保护旧项目,则需要使用STEP7-MicroWIN SMART V2.8 打开旧项目、永久删除POU的密码,然后再次对POU进行密码保护。